Make sure you have installed all the dependencies and configured PYTHONPATH system variable correctly
*see installation guide for detail
Controlling Robot
-
Turn on the robot. See this guide for detail
-
Start the robot bridge on your computer
$ roslaunch nao_bringup nao_full_py.launch nao_ip:=<robot_ip> \ roscore_ip:=<roscore_ip>This will start the robot’s default configuration with the following publisher:
- joint_states
- tf
- top camera
- bottom camera
- left sonar
- right sonar
- microphone
-
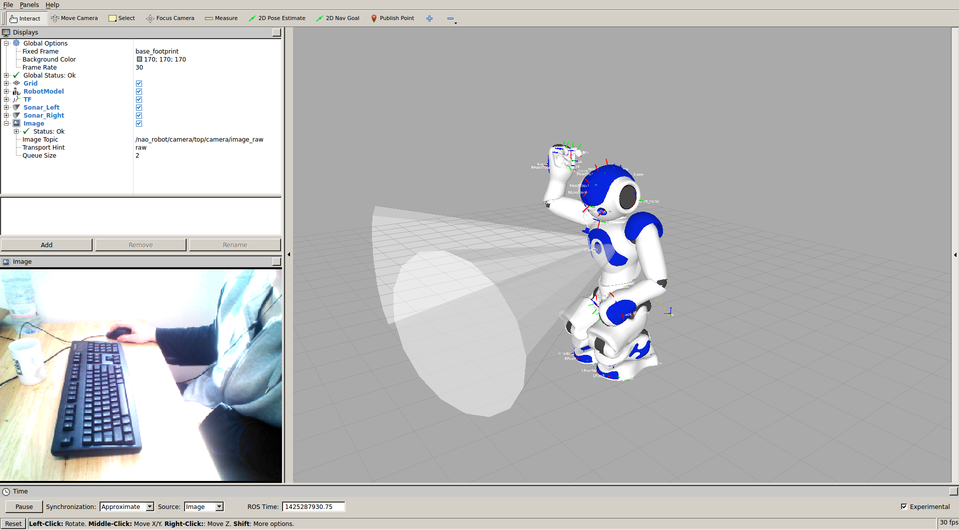
To visualize the robot, open rviz
$ rosrun rviz rviz- In top bar, go to
File->Open Config - navigate to
<your catkin workspace>/src/nao_robot/nao_description/configand open the file with .rviz extension- make sure you have nao_meshes installed
- you should see something similar to the below screenshot
- In top bar, go to
-
Controlling the robot
-
execute
rosnode listto check if /nao_walker node is running -
To turn on the motors
$ rosservice call /body_stiffness/enable "{}"To turn off the motors
$ rosservice call /body_stiffness/disable "{}" -
once the motors are on, use the following command to move the robot in x-direction
$ rostopic pub -1 /cmd_vel geometry_msgs/Twist \ '{linear: {x: 1.0, y: 0.0, z: 0.0}, \ angular: {x: 0.0, y: 0.0, z: 0.0}}'To stop the robot, run:
$ rostopic pub -1 /cmd_vel geometry_msgs/Twist \ '{linear: {x: 0.0, y: 0.0, z: 0.0}, \ angular: {x: 0.0, y: 0.0, z: 0.0}}'
-
Next: NAOqi SDK Guide
Reference
Zijian Hu
Member of Technical Staff - Pre-Training
My research interests include large language model, multimodal ML, and robotics.