Biography
Zijian Hu is a Member of Technical Staff at Reflection AI. He is interested in building efficient machine learning systems that can operate in noisy environments and can be trained and adapted with minimal supervision.
Notice this website is not being actively maintained. Please see my LinkedIn for most up-to-date information.
Download my CV (last updated on Nov 17, 2022) for more details.
Interests
- Large Language Model
- Multimodal Foundation Model
- Machine Learning Systems
- Self-Supervised Learning
- Efficient Machine Learning
- Computer Vision
- Natural Language Processing
Education
-
MSc in Computer Science, 2020
University of Southern California
-
BSc in Computer Science, 2020
University of Southern California
Skills
Machine Learning
PyTorch, TensorFlow, Keras, OpenCV
Robotics
ROS, OpenCV, V-Rep
Mathematics
Statistical Learning, Probability, Calculus
Programming Languages
Python, C/C++, Java, JavaScript (ES6), MATLAB
Web Development
Node.js, Java EE, Angular
Computer System & Hardware
X86 Assembly/GAS, MIPS, Verilog, Arduino
Experience
Machine Learning Research Engineer
- Working on mega-scale LLM training and machine learning systems for GenAI
- Working on synthetic data generation for math and reasoning
Machine Learning Engineer
- Led the pre-training and post-training of Fox-1 1.6B, TensorOpera’s in-house LLM.
- Currently Fox-1 1.6B has ranked top-5 on Open LLM Leaderboard for LLMs under 4B.
- Led the development of TensorOpera’s LLM inference solutions.
- Developed FedLLM - TensorOpera’s federated LLM training framework.
Research Engineer, Computer Vision
- Worked on the following topics at ByteDance Intelligent Creation Lab:
- Computer Vision
- Video Content Understanding
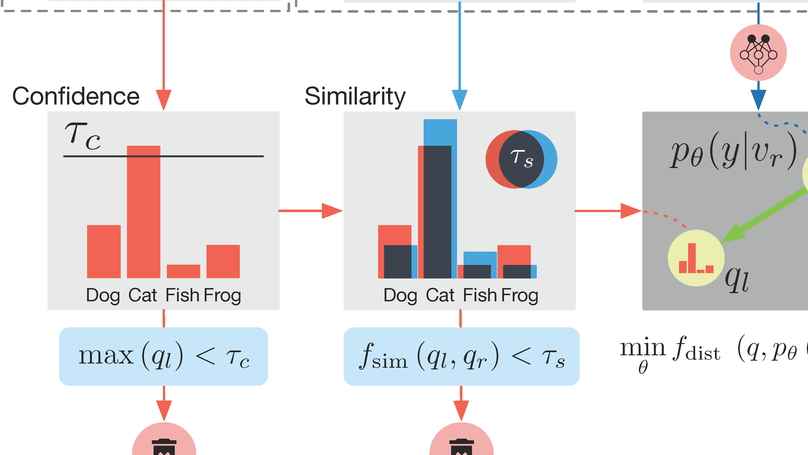
- Semi-Supervised Learning
- Self-Supervised Learning
- Multimodal Machine Learning
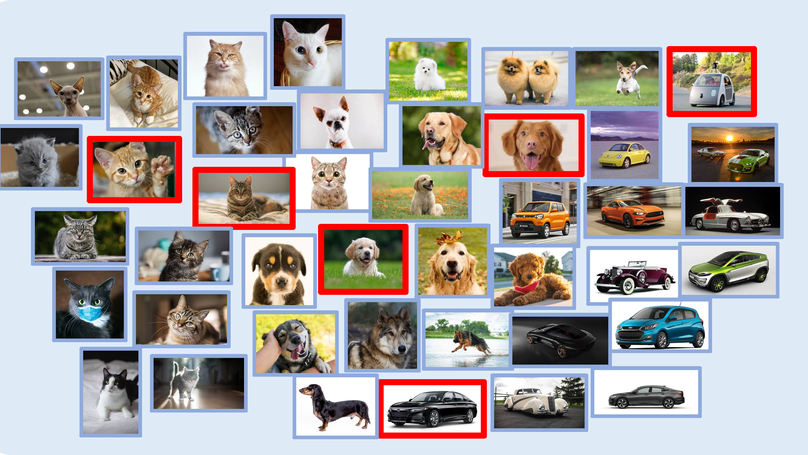
- Object Detection
- Open-Set Learning
Research Staff (Full-time)
- Advised by Professor Ram Nevatia
- Research Area:
- Computer Vision
- Semi-Supervised Learning
- Low-Shot Learning
- Unsupervised Learning
- Projects:
Recent Publications
Quickly discover relevant content by filtering publications.
(2020).
Can I Trust You? A User Study of Robot Mediation of a Support Group.
2020 International Conference on Robotics and Automation (ICRA).
(2019).
Design and Evaluation of Expressive Turn-Taking Hardware for a Telepresence Robot.
2019 IEEE International Symposium on Robot and Human Interactive Communication (Ro-Man).
(2019).
User Interface Tradeoffs for Remote Deictic Gesturing.
2019 IEEE International Symposium on Robot and Human Interactive Communication (Ro-Man).




Contact
- 3737 Watt Way, Los Angeles, CA 90089
- Email me for detail
- Monday 10:00 to 13:00
- DM Me